ENGELDEN KAÇAN ROBOT YAPILIŞI
Bu çalışmada yapacağımız robot etrafında algıladığı engellerden kaçarak yolunu bulmaya çalışır. Robotumuz engelleri ön tarafında bulunan HC-SR04 mesafe sensörleri ile algılar. Bu mesafe sensörünü ise bir servo motor ile hareket ettirir.
Robotumuz paletler üzerinde hareket eder. Paletleri ise redüktörlü sarı motorlar hareket ettirir. Tüm robotun kontrolünü içerisinde bulunan Arduino nano gerçekleştirir.
GEREKLİ MALZEMELER

NOT: Bu listede verilen YHB civatalar havşa başlı civatalardır. Fakatat YSB veya İmbus civatalarla da robot yapılabilir. Ayrıca cıvata boyları birçok yerde birkaç mm uzun olması sorun olmaz. Elinizde bulunan civatalarla yapmayı deneyebilirsiniz
6 ADET M3X30MM CİVATA
2 ADET M3X20 CİVATA
2 ADET M3X15 CİVATA
16 ADET M3X10 CİVATA
26 ADET M3 SOMUN
3D YAZICI İLE ÜRETİLMİŞ PARÇALAR (Fotoğrafta verilmiştir.)
1 ADET ARDUINO NANO
1 ADET SG90 SERVO MOTOR
1 ADET HC-SR04 MESAFE SENSÖRÜ
2 ADET SARI REDÜKTÖRLÜ HOBİ DC MOTOR
1 ADET L298 MOTOR SÜRÜCÜ
1 ADET 4 LÜ AA PİL YUVASI
1 ADET KÜÇÜK BREADBOARD
4 ADET AA PİL
BİR MİKTAR JUMPER KABLO

Şekil 1 3D YAZICIDA ÜRETİLECEK PARÇALAR

YAPILIŞ ADIMLARI
HAZIRLIK
Bu aşamada 3d baskı ile üretilmiş plastik parçalarda bulunan deliklere 3mm matkap ucu ile genişletmemiz gerekmektedir. Sadece palet parçalarını 2mm matkap ucu ile genişleteceğiz. Kalan parçaları 3mm matkap ucu ile genişletmeliyiz.
ŞASE YAN PLAKALARININ TABAN PLAKAYA MONTAJLANMASI
Bu adımda sağ plaka ve sol plaka parçalarını alt plaka parçasına montajlamamız gerekmekte. Bunun için fotoğrafta görünen sağ plaka sol plaka ve alt plaka parçalarını alıyoruz. M3x10mm civatalarımızla ortadaki deliklerden bu üç plakayı birbirine montajlıyoruz. Fotoğrafta montaj işlemi görülmektedir.


ÖN VE ARKA PLAKALARIN MONTAJLANMASI
Bu aşamada robotumuzun ön ve arka plakalarını şaseye montajlamamız gerekmektedir. Bu aşamada da m3x10mm civatalarımız ve somunlar yardımı ile montaj işlemini gerçekleştiriyoruz. Fotoğraflarda montaj daha kolay anlaşılmaktadır:




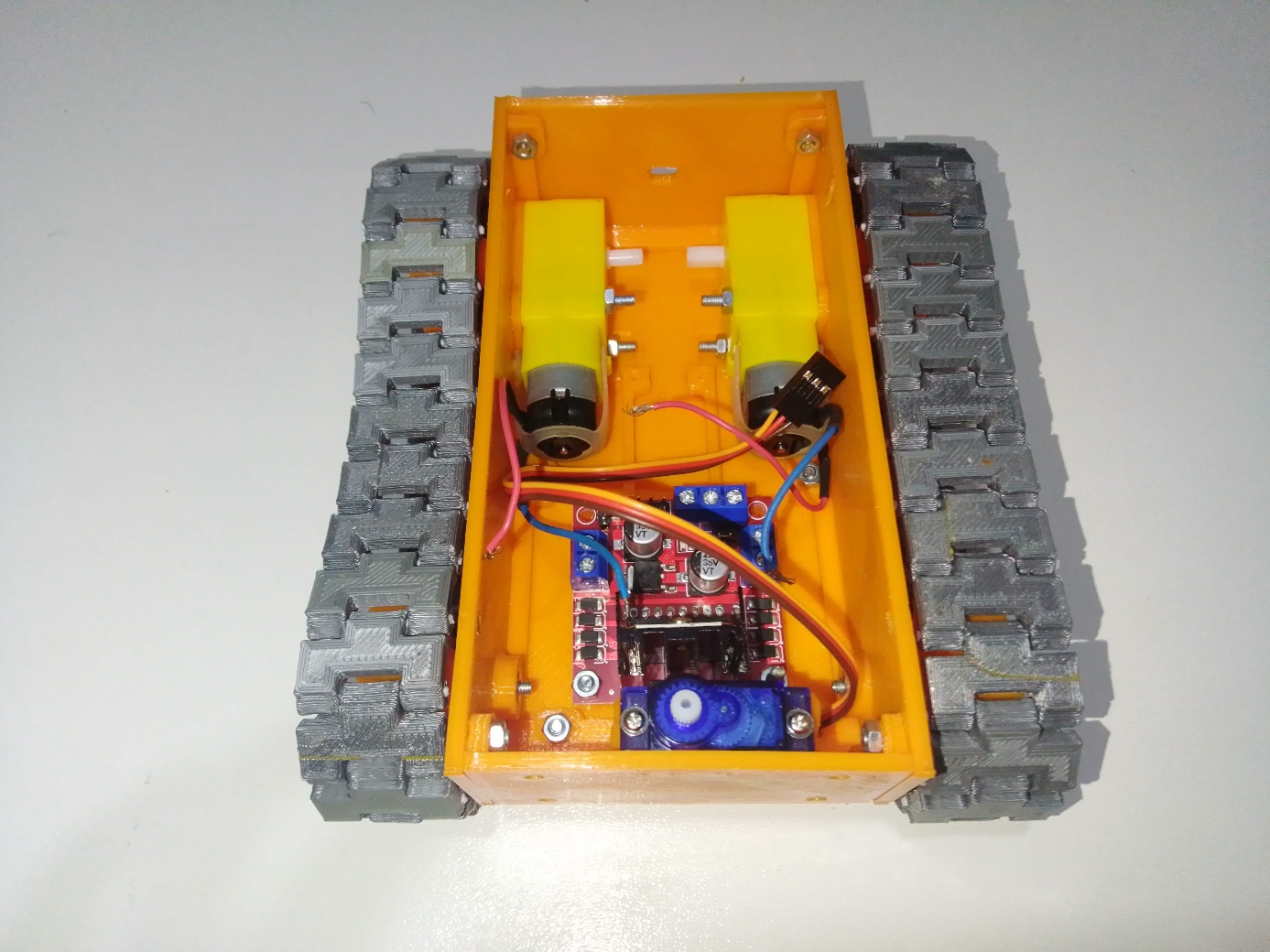
MOTORLARIN HAZIRLANMASI VE GÖVDEYE MONTAJLANMASI
Bir önceki adımda gövde montajımızı tamamladık. Bu aşamada ise motorlarımıza kabloları bağlıyoruz. Daha sonra da motorları gövde parçamıza montajlıyoruz. Aşağıdaki fotoğraftaki gibi motorları yan yana koyduğumuzda sağdaki kablolar kırmızı soldaki kablolar mavi olacak şekilde kabloları motorlara bağlıyoruz. Bu bağlama işlemi lehimleyerek de yapılabilir kabloyu sarmak yöntemiyle de olabilir.

Daha sonra hazırladığımız bu motorları gövde parçasına fotoğraflardaki gibi montajlıyoruz. Montaj esnasında m3x30mm civataları kullanıyoruz




MOTOR SÜRÜCÜSÜNÜN MONTAJLANMASI
Motorları yerlerine montajladıktan sonra motor sürücüsünü gövdede bulunan yerine 2 adet m3x15 cıvata ile montajlıyoruz. Motor sürücüsü üzerinde 4 adet montaj deliği olsa da, pcb boyutlarındaki ufak farklılıklardan dolayı denk gelen 2 deliği kullanmamız yeterli olacaktır. Montajın nasıl olacağı fotoğraflarda gösterilmiştir.




SERVO MOTORUN MONTAJLANMASI
Bu aşamada robotun ön kısmına ön plakada bulunan yere sg90 servo motoru montajlamamız gerekmektedir. Bu işlem için servo motor paketinden çıkan 2 adet montaj civatasını kullanacağız. Bu aşamada servo motorun beyaz dişlidi ön kısmın tam ortasına gelecek şekilde montajlanmalıdır. Yöne dikkat etmelisiniz. Montaj detayları fotoğraflarda gösterilmiştir.



ÖN DİŞLİLERİN MONTAJLANMASI
Bu aşamada ön sağda ve ön solda bulunan palet dişlilerini montajlayacağız. Bunun için 2 adet ön dişli plastik parçasına, 2 adet ax plastik parçasına 2 adet rulman plastik parçasına ve 2 adet m3x30 mm cıvata ve somuna ihtiyacımız var.

Bu parçalar hazırsa m3x30mm cıvataya silindirik rulman parçasını geçiriyoruz. Rulman parçasını ve civatayı da ön dişli parçasının göbeğinden geçiriyoruz. Rulman parçası dişli plastiğinin geniş deliğinin içerisinde kalacaktır. Ardından aks parçasını, ince kısmı dişli tarafında kalacak şekilde cıvataya geçiriyoruz. İşlem fotoğrafta gösterilmiştir.



Ardından bu civatayı, gövdenin sağ ve sol yanlarındaki deliklerden geçiriyoruz. Karşı tarafa ise m3 somunu kullanarak tekeri montajlıyoruz. Bu aşamada montaj sonunda dişli parçasının zorlanmadan serbest dönebilmesi gerekmektedir. Fotoğraflarda detaylar bulunmaktadır.



ARKA PALET DİŞLİLERİNİN MONTAJLANMASI
Bu dişliler motorun dönme hareketini paletlere iletirler. Bu aşamada 2 adet arka dişli plastik parçasına ihtiyacımız var. Bu parçaları, gövdeye daha önce montajladığımız motorların plastik millerine montajlıyoruz. Montaj çok sağlam değilse dişlinin içerisine biraz yapıştırıcı sürebilirsiniz. Detaylar fotoğraflarda yer almaktadır.




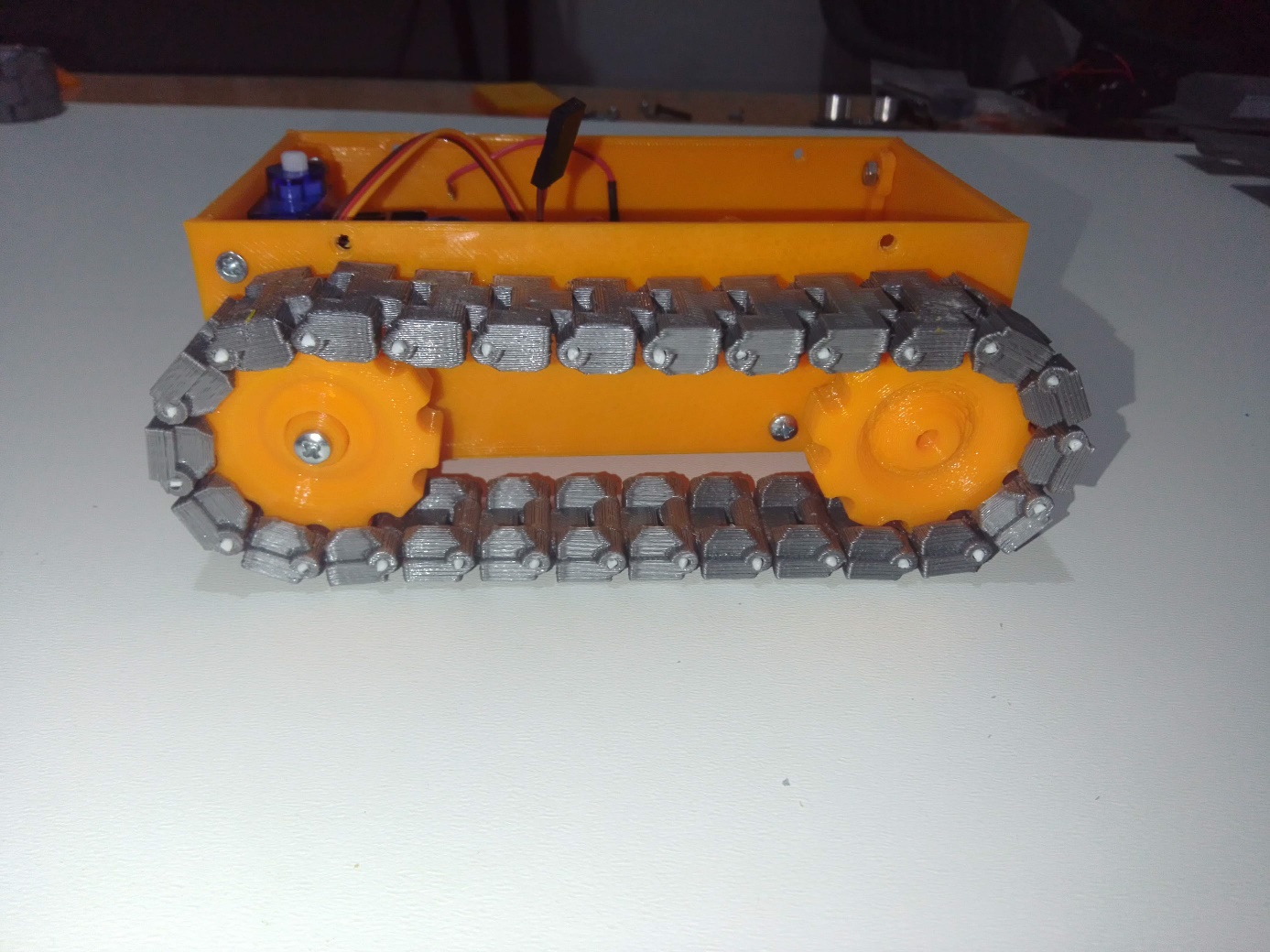
PALETLERİN YAPILMASI VE MONTAJLANMASI
Her bir palet için 26 şar adet palet zincirine ihtiyacımız var. Palet zincirlerini birbirine filament parçalaı ile bağlamamız gerekiyor. Filament parçaları palet zincirlerindeki deliklerden geçmiyorsa 2mm matkap ucu kullanarak bu delikleri genişletmek gerekmektedir. Fotoğraflardaki gibi 26 zincir parçasını birleştirerek iki palet oluşturuyoruz.




“
İstenir veya ihtiyaç duyulursa, aşağıdaki fotoğraftaki gibi, zincirleri montajlamakta kullanılan filamentlerin bir tarafına yapıştırıcı sürülerek filamentin yerinden çıkmaması sağlanabilir. Ama genel olarak buna ihtiyaç duyulmaz.

Bu şekilde paletlerimiz oluştuktan sonra fotoğraftaki gibi robotumuzu paletin üzerine koyuyoruz.

Ardından sağ ve sol palet uçlarını yukarıda birleştirip yine filament parçası ile montajlıyoruz. Bu işlemi iki taraf için de gerçekleştiriyoruz.

MESAFE SENSÖRÜNÜN MONTAJLANMASI
Bu aşamada servo bağlantısı, sensör kapak, sensör tutucu, m3x20mm iki adet cıvata ve somun, m3x10mm iki adet cıvata ve somuna ve bir de mesafe sensörüne ihtiyacımız var.

Mesafe sensörünün pinlerini bir pense ile bükerek doğrultuyoruz. Pinler aşağıdaki fotoğraftaki gibi olmalı

Ardından servo bağlantı parçasını sensör tutucu parçaya fotoğraftaki gibi 2 adet m3x10mm cıvata ile montajlıyoruz.


Daha sonra mesafe sensörünü parçaya yerleştiriyoruz:


Son olarak iki adet m3x20 cıvata ve somun kullanarak sensör kapağını montajlıyoruz:


ARDUİNOYA KODUN ATILMASI
Arduino nanoyu bilgisayarımıza bağlıyoruz. Ardından zip dosyası içerisindeki veya buraya eklenen Arduino_Car dosyasını açıyoruz. Bu kodu Arduino nanoya yüklüyoruz. Bazı kütüphaneleri yüklemeniz gerekebilir. Örnek olarak NewPing.h kütüphanesi ile ilgili bir hata alırsanız, Arduino IDE içinde "Sketch" menüsünde "Include Library" seçeneğini seçip "Manage Libraries" seçeneğini seçebilirsiniz. Bu seçenek kullanılarak arama yaparak veya kategoriye göre filtreleme yaparak direk olarak NewPing.h kütüphanesini arayabilirsiniz ve yükleyebilirsiniz.
KABLO BAĞLANTILARI
Bu aşamada aşağıda verilen fotoğraftaki bağlantıları kurmaya çalışacağız. Bu bağlantılardan tek farkımız ise, biz ortada bulunan pcb parçasını kullanmayacağız. Bunun yerine mini breadboard kullanacağız. Ayrıca biz 4 adet AA pil kullanacağız.

İlk olarak motorlardan çıkan kabloları motor sürücülerin sağ ve sol kısmındaki klemenslere bağlıyoruz. Bağlarken fotoğraftaki gibi önceden yaptığımız farklı renklerin klemenslere nasıl bağlandığına dikkat ediniz.

Ardından Arduino nanomuzu breadboardımızıa şekildeki gibi takıyoruz. Bu şekilde 5v ve GND tarafında 4 sıra, diğer tarafta ise 1 sıra kalmış oluyor. GND ve 5V pinlerine birden çok jumper takacağımız için böyle yaptık.


Ardından breadboardın altındaki çift taraflı bant ile bu grubu iki adet sarı motorun üzerine yapıştırıyoruz. Fotoğrafta detaylar verilmiştir.

Daha sonra 3 adet erkek-erkek jumperi L298N motor sürücüsünün ön tarafındaki 3 klemense takıyoruz. Bu jumperleri daha sonra fotoğraftaki gibi beyaz olanı 5V, mor olanı GND ve turuncu olanı VIN pinine gelecek şekilde takıyoruz.

Ardından motor sürücünün ön kısmında bulunan 6 pine dişi erkek jumperler bağlıyoruz. Bu arada bu pinlerin fotoğraftaki gibi açık olması gerekiyor. Üzerlerinde bağlı plastik kısadevreler varsa çıkartabilirsiniz.

Bu 6 jumperi daha sonra breadboard üzerinden, klemense yakın olan mor jumper D11 pinine gelecek şekilde sırayla mavi D10, yeşil D9, siyah D8, beyaz D7 ve gri D6 pinlerine bağlıyoruz. Fotoğraftaki renklerden sıralamayı takip edebilirsiniz.

Bu işlemden sonra servo motor kablosunun ucuna 3 adet erkek-erkek jumper takıyoruz. Bu jumperlerden, servonun kahverengi kablosuna bağlı olanı breadboarddan GND kısmına, kırmızıya bağlı olanı breadboarddan 5V kısmına takıyoruz. Turuncu veya sarıya bağlı olan sinyal kablosunu ise fotoğraftaki gibi D5 pinine takıyoruz.


Mesafe sensörüne dişi-erkek 4 adet jumper takıyoruz. Bu jumperlerden sensörün GND pinine bağlı olanı breadboardda GND kısmına, sensörün VCC pinine bağlı olanı ise breadboardın 5V kısmına takıyoruz. Sensörün Trig pinine bağlı olan jumper arduinonun D3 pinine, Echo pinine bağlı molan jumper ise arduinonun D2 pinine bağlanıyor. Bağlantıyı daha önce verdiğimiz bağlantı şemasından veya fotoğraflardaki kablo renklerinden takip edebilirsiniz.






Bağlantıdan sonra sensörü servo üzerine bastırarak takıyoruz.


PİL YUVASI VE ÜST KAPAĞIN MONTAJI

Pil uvasından çıkan 2 kablodan kırmızı olana dişi, siyah olana da erkek jumper kesilip soyularak montajlanmalıdır.

Daha sonra pil yuvasını üst kapak üzerine ister çift taraflı bantla isterseniz silikon kullanarak yapıştırınız.


Yapıştırdıktan sonra kabloları fotoğraftaki gibi ortada bulunan delikten içeri sokunuz. Ardından kırmızı kabloyu tekrardan arka delikten dışarı çıkartınız.

Ardından bir adet erkek erkek jumperin bir ucunu breadboarddan, arduino’nun VIN pinine takınız.

Bu kabloyu üst kapağı takarken dışarı çıkaracağız.
Şimdi ise pil kutusundan gelen siyah erkek jumperi breadboarddan arduino’nun GND pinine denk gelen yere takınız.

Şimdi ise daha önceden VIN pinine taktığımız kablo, pil yuvasından gelen kırmızı kabloyla birlikte, üst kapağın arka deliğinden çıkacak şekilde üst kapağı kapatınız.


Bu sırada sensör kablolarının biraz dışarıda kalmasına izin veriniz. Çünkü sensör döneceği için kabloların uzun kalması gerekmekte

Son olarak ön sağ ve soldaki yarım daire deliklerden ve yanlardaki deliklerden, ister m3x10mm cıvata ile isterseniz kablo bağı ile üst kapağı sabitleyin.

4 adet AA kalem pili pil yuvasına yerleştirin. Robotumuzu kaçmasın diye göbeğinden paletleri yere değmeyecek şekilde bir nesnenin üzerine koyun.

Ardından robotun arkasından çıkan biri dişi biri erkek (mor ve kırmızı) jumperleri birbirine takın. Bu jumperleri aç kapa anahtarı olarak kullandık. Buraya isterseniz KCD5 mini yuvarlak anahtarları da kullanabilirsiniz.

Jumperleri birbirine taktığınızda robotunuz çalışacaktır. Altına yükseltici nesne koyduğumuzdan sensör sağa sola dönecek paletler hareket edecektir.

SENSÖR KALİBRASYONU
Robot çalıştığında sensör sağa sola hareket edecek ortada duracaktır. Bu orta noktada sensör ön plakaya paralel, yani robotun tam karşısına bakar halde olmalıdır. Robot ilk çalıştığında bu böyle olmayabilir.
Bunun için robot çalıştığında sensörü takip ediniz. Sağa sola dönüp ortaya baktığında jumperleri ayırınız ve robotu durdurunuz. Sensörü servo bağlantısından sökünüz. Ama bu sırasa sensörü/servoyu sağa sola döndürmeyiniz.
Sensörü söktükten sonra ön plakaya paralel olacak şekilde, servoyu ve döndürmeden tekrar montajlayınız.
EĞLENCE
Robotunuz hazır. Robotunuz etrafını kontrol ederek hareket edecektir. Bu hareket sırasında engellere denk geldikçe sağa sola dönerek engelsiz yollar arayacaktır.
Unutmayın ki bu bir hobi projesidir. Bu nedenle çok profesyönel bir sonuç beklemeyin, eğlenmeye bakın.
KAYNAKLAR:
Bu robot https://www.thingiverse.com/thing:4127711 bu linkte bulunan tasarım temel alınarak yapılmıştır. Bazı parçalar yeniden tasarlanmış veya revize edilmiştir. Tasarım sahibine teşekkür ederiz.